
żródło: internet
Rozpoczynając programowanie robotów warto poświęcić chwilę algorytmom. Ułatwi nam to napisanie czytelnego i efektywnego programu, zapobiegnie powstaniu wielu błędów oraz zaoszczędzi czas spędzony na analizie popełnionych błędów.
Czym jest algorytm? z definicji jest to uporządkowany sposób działania dążący do określonego celu przy użyciu skończonej ilości kroków. W praktyce oznacza, że każdą wykonywaną przez nas czynność możemy zapisać jako ciąg działań i pytań oraz decyzji. I tak dla przykładu poniżej znajduje się prosty algorytm codziennej czynności wykonywanej przez nas takiej jak parzenie herbaty.
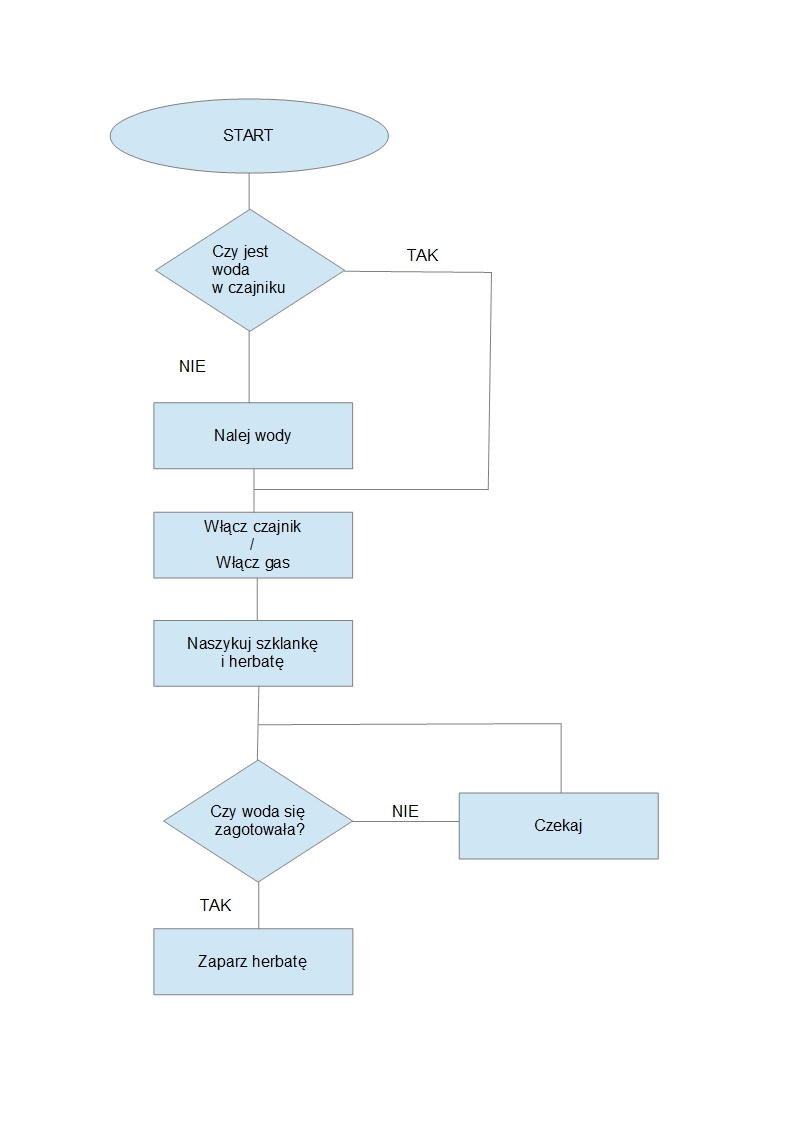
Alg. 1
Oczywiście zaprezentowany przykład jest prosty i nie uwzględnia wszystkich możliwych sytuacji i warunków z jakimi możemy się spotkać podczas tego procesu np. czy mamy czyste szklanki, herbatę i tym podobne, daje nam jednak pogląd na to że nawet rzeczy oczywiste podlegają pewnym regułom i da się je opisać tak aby tą czynność zautomatyzować.
Aby algorytm był czytelny najczęściej stosuje się jego graficzną reprezentację za pomocą bloków i znajdujących się w nich opisach. Dla odróżnienia funkcji jaką pełni dany blok używa się różnych kształtów. I tak mamy:
-
Bloki funkcyjne W tym miejscu umieszczamy instrukcje służące do wykonywania
zadań. W naszym przykładzie będzie: to otwórz szafkę, weź szklankę postaw na stole, weź łyżeczkę itd… W przypadku robota w takim bloku umieścimy: ruchy osi, zmiana prędkości ruchu, sygnały EUROMAP itd.
-
Bloki warunkowe (decyzyjne, pytania)
Znajdują się tutaj instrukcje warunkowe których używamy jako pytania i udzielamy na nie odpowiedzi w zależności od których wykonujemy odpowiednie bloki funkcyjne. W naszym przykładzie są to pytania o ilość wody i czy się zagotowała.W programie robota będą to wszystkie instrukcje warunkowe takie jak: IF, ELSE, ELSEIF
-
Bloki wprowadzania i prezentacji danych.
Służą one do pobierania danych z interfejsu graficznego lub prezentacji danych poza programem. W takim bloku możemy umieścić również instrukcje służące do odczytu wejść peryferyjnych sterujących pracą robota, lub wyjścia służące do prezentacji stanu pracy robota.

-
Wracając do algorytmu pracy robota.
Poniżej przedstawiony jest prosty algorytm dla programu typu „pick and place”. Widzimy bloki odpowiedzialne za pojedyncze czynności takie jak odbiór detalu czy odłożenie go na taśmociąg. Mamy też dwa bloki warunkowe które służą do rozdzielania linii programu w zależności od tego czy warunek jest spełniony czy też nie.
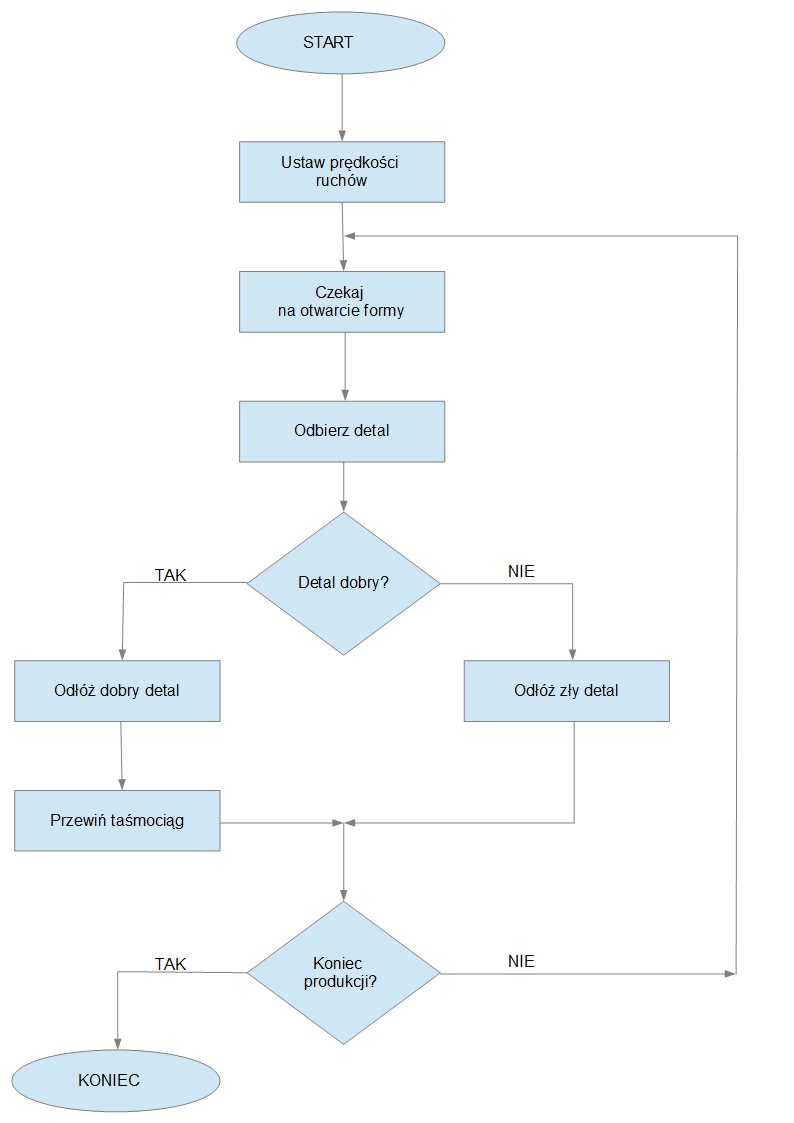
A tak będzie to wyglądało w programie:
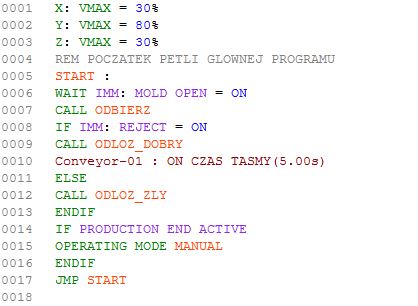
Łatwo przekonać się, że zastosowanie graficznej formy działania naszego programu daje nieocenione korzyści w postaci przejrzystości struktury programu, ułatwia zrozumienie zasady działania, a jak się wkrótce okaże ułatwi nam również pracę podczas samego pisania programu.
Pingback: Programowanie robotów - skoki i instrukcje warunkowe IF - ASCONS