Podczas programowania robotów przeznaczonych do współpracy z maszynami wtryskowymi, niezbędna jest znajomość interfejsu EUROMAP 67. Stworzony został przez organizację EUROMAP i stanowi on standard do przesyłania informacji pomiędzy wtryskarką a robotem. Dzięki temu robot ma możliwość bezpiecznej i skutecznej współpracy z wtryskarką poprzez kontrolowanie jej ruchów.


Sygnały EUROMAP 67
- obwód bezpieczeństwa, wyłącznik awaryjny(dwa kanały)
- obwód bezpieczeństwa, drzwi ochronne (dwa kanały)
- pozycje: zamek, wyrzutnik, rdzenie
- zezwolenia: zamek wyrzutnik, rdzenie
- inne: wolny obszar formy, detal wybrakowany, sutomat, praca z robotem
Pełną specyfikację standardu można znaleźć tuaj.
W tabeli 1. przedstawiono opis funkcji poszczególnych pinów złącza.
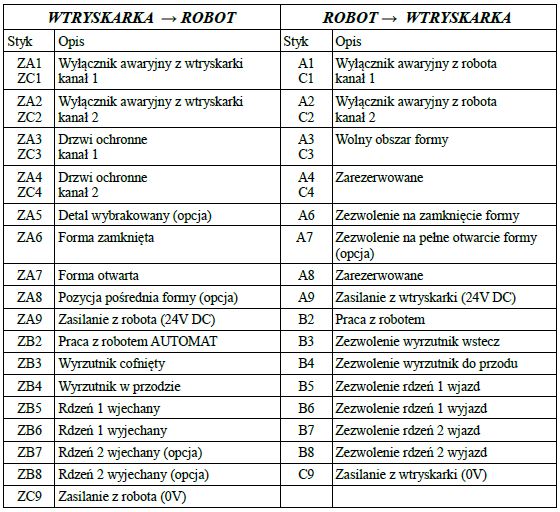
Poniższe zdjęcia przedstawiają podgląd sygnałów ze złącza na wtryskarce BATTENFELD i robocie WITTMANN.
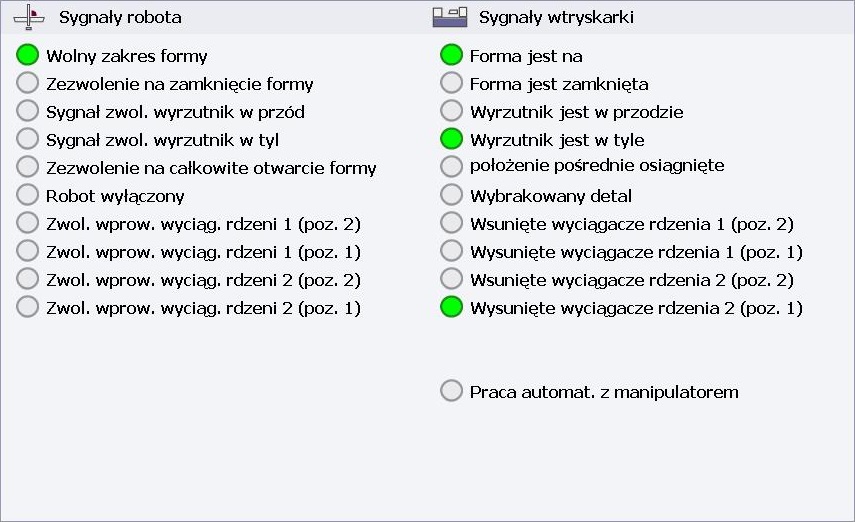
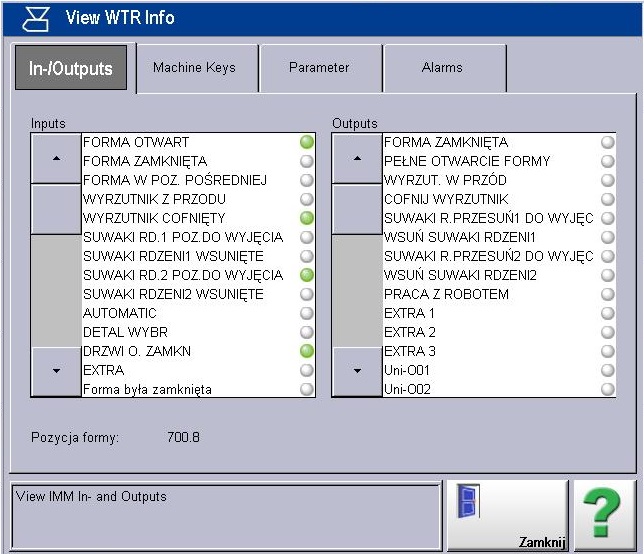
Na szczególną uwagę zasługują piny: A3-C3 oznaczone jako wolny obszar formy. Jest to sygnał wystawiany przez robota informujący wtryskarkę o tym, że ramie robota znajduje się poza obszarem pracy narzędzia. Sygnał ten uzależniony jest od pozycji listew na osiach robota lub (dla robotów z enkoderami absolutnymi) zaprogramowanych uprzednio pozycji. Ważne jest, aby sprawdzić jego prawdłowe działanie przed rozpoczęciem programowania. Można to zrobić wjeżdzając ramieniem robota w obszar pracy formy, a następnie na stronie diagnostycznej przyłącza robota we wtryskarce sprawdzić obecność sygnału wolny obszar formy. W przypadku wtryskarek, w których brak strony diagnostycznej przyłącza euromap, działanie sygnału można sprawdzić próbując bardzo powoli zamknąć formę w trybie ustawczym. W takim przypadku należy zachować szczególną ostrożność i robić to bez zamontowanego narzędzia na wtryskarce tak, aby w przypadku nie zadziałania zabezpieczenia nie doszło do kolizji robota z formą. Jeśli zabezpieczenie działa prawidłowo, stół maszyny nie poruszy się. Sprawdzenia sygnału wolny obszar formy należy dokonywać przy każdym nowym lub nieznanym robocie, jak i również po każdej relokacji robota. Oczywiście należy również sprawdzić działanie wyłączników awaryjnych wtryskarki i robota jak i potwierdzenie otwarcia drzwi ochronnych wtryskarki.
Polecenia programowe robota dla komunikacji z wtryskarką
- Robot –> wtryskarka
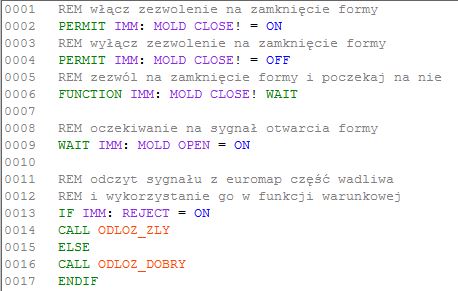
- zezwolenie włącz/wyłącz
- funkcje automatycznie realizowana sekwencja poleceń odpowiedzialnych za dany ruch, np. sekwencja ruchu wyrzutnika w przód.
- Wtryskarka –> robot
- wait oczekiwanie na sygnał potwierdzający pozycje dla danej osi wtryskarki, do czasu jego pojawienia się program nie przejdzie do następnej lini
- if funkcja warunkowa uzależniająca wykonanie programu od obecności sygnału
A tak wygląda to w programie robota:
Obecnie coraz więcej producentów wprowadza do swojej oferty integracje robotów z maszyną wtryskową. Z punktu widzenia programowania robotów nie ma to żadnego wpływu na pracę robota czy też sposób jego programowania. Różnice pojawiają się w warstwie sprzętowej gdzie standardowe złącze jest emulowane przez program i przesyłane za pomocą sygnału sieciowego, co istotne sygnały odpowiedzialne za bezpieczeństwo takie jak: wyłączenie awaryjne, drzwi ochronne i wolny obszar formy nadal pozostają podłączone w tradycyjny sposób.
Pingback: Podprogramy Wittmann - ASCONS . Programowanie robotów