Roboty firmy Wittmann są powszechnie stosowane w przemyśle, gdzie wymagana jest precyzja i powtarzalność ruchów. Te maszyny oferują możliwość przemieszczania narzędzi lub przedmiotów w liniowy sposób w trzech osiach podstawowych (X, Y i Z). Opcjonalnie mogą posiadać trzy dodatkowe osie (A, B, C), co czyni je idealnymi do wielu zastosowań, takich jak odbieranie wyprasek z form wtryskowych, montaż, pakowanie, paletyzacja i wiele innych. Jednak aby osiągnąć optymalną wydajność i precyzję, niezbędne jest zrozumienie i kontrolowanie prędkości oraz przyspieszenia robotów Wittmann.
Prędkość w Robotach Wittmann
Prędkość w robotach Wittmann odnosi się do zmiany położenia w przestrzeni na jednostkę czasu. Może być wyrażana w różnych jednostkach, takich jak milimetry na sekundę (mm/s) lub metry na sekundę (m/s), w zależności od skali ruchu i aplikacji.
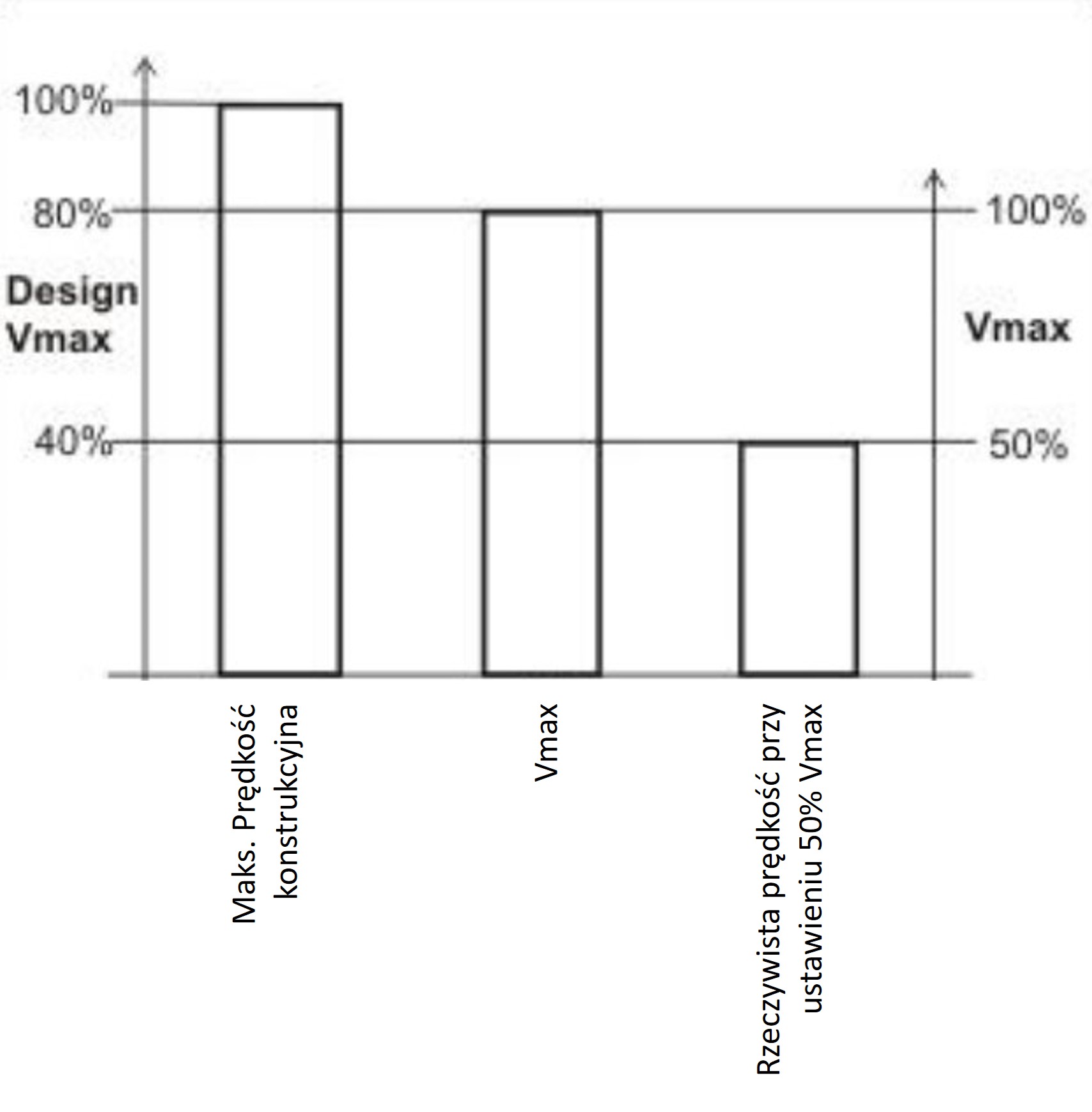
Polecenie Vmax (Rysunek 1) służy do ustawiania maksymalnej prędkości jako procentu skonfigurowanej maksymalnej prędkości osi numerycznej. Na rzeczywistą prędkość w trybie pracy automatycznej dodatkowo ma wpływ opcja „nadpisywania” zaprogramowanej prędkości, która w sterowniku robota nosi nazwę Ovveride. Rysunek 2 pokazuje wzajemną relację pomiędzy poleceniem Vmax a Ovveride. Polecenie Vmax pozostaje aktywne do następnej instrukcji Vmax lub Vabs.
Znaczenie Precyzyjnej Kontroli Prędkości
Kontrolowanie prędkości jest kluczowym aspektem zapewnienia precyzyjnego wykonywania zadań przez robota Wittmann. Odpowiednio dostosowana prędkość pozwala na uniknięcie błędów i zniszczeń, zwłaszcza w aplikacjach wymagających delikatności, takich jak odbiór elementów wtryskowych wizualnych czy manipulacje w ograniczonych obszarach.
Prędkość jest również istotna w kontekście efektywności operacji. W zastosowaniach przemysłowych, szybkie ruchy mogą przekładać się na zwiększoną produkcję, co jest szczególnie ważne w produkcji masowej.
Polecenie Vabs (Rysunek 3) to funkcja, która umożliwia ustawienie niezależnej prędkości od nastawionej w oknie Ovveride w mm/s. Opcja ta jest przydatna w celu dostosowania do ruchów m.in wypychacza. Polecenie Vabs jest aktywne do następnego polecenie Vmax lub Vabs.
Przyspieszenie w Robotach Wittmann
Przyspieszenie to wskaźnik, który opisuje zmianę prędkości na jednostkę czasu. Jest to kluczowy parametr w kontekście robotów Wittmann, ponieważ wpływa na to, jak szybko robot może rozpocząć ruch, osiągnąć docelową prędkość i zatrzymać się. Przyspieszenie jest mierzone w jednostkach takich jak milimetry na sekundę do kwadratu (mm/s²) lub metry na sekundę do kwadratu (m/s²).
Polecenie Aabs (Rysunek 4) umożliwia regulację maksymalnego przyspieszenia w mm/s^2, gdy seryjna konfiguracja jest niewystarczająca do danej produkcji. Ustawienie jest aktywne do następnego polecenie Aabs.
Wpływ Przyspieszenia na Precyzję i Wydajność
Precyzyjna kontrola przyspieszenia jest niezwykle istotna w zadaniach, które wymagają dokładnego pozycjonowania narzędzi lub przedmiotów. W przypadku, gdy robot musi szybko zmienić kierunek ruchu lub zatrzymać się na punkcie docelowym, odpowiednie przyspieszenie jest kluczowe. Zbyt duże przyspieszenie może spowodować uszkodzenie lub wibracje. Zbyt małe przyspieszenie może prowadzić do dłuższego czasu cyklu i obniżonej wydajności.
W przemyśle, gdzie dokładność jest kluczowa, jak w produkcji wyprasek z automatycznym montażem lub odbiorze precyzyjnych części, odpowiednie kontrolowanie przyspieszenia jest niezbędne do utrzymania jakości produktów.
Programowanie Prędkości i Przyspieszenia
Programowanie prędkości i przyspieszenia w robotach Wittmann jest zadaniem, które należy dokładnie przemyśleć. Operator lub programista musi dostosować te parametry do konkretnego zadania i środowiska pracy robota. To wymaga zrozumienia charakterystyk maszyny oraz ewentualnych ograniczeń mechanicznych, takich jak maksymalne prędkości i przyspieszenia, które może osiągnąć dany robot.
Dostępność zaawansowanych sterowników i oprogramowania umożliwia programistom precyzyjną kontrolę nad prędkością i przyspieszeniem, co pozwala na optymalizację wydajności i precyzji.
Podsumowanie
Prędkość i przyspieszenie są kluczowymi parametrami w robotach Wittmann. Precyzyjna kontrola parametrów jest niezbędna do osiągnięcia optymalnej wydajności i precyzji w różnych zastosowaniach, od produkcji przemysłowej po robotykę precyzyjną. Programiści i operatorzy muszą dokładnie dostosować prędkość i przyspieszenie do konkretnych zadań i warunków pracy, aby osiągnąć najlepsze wyniki. Wiedzę na temat zasad można pozyskać poprzez doświadczenie jak również dzięki specjalistycznym szkoleniom. Szkolenia wyjaśniają w prosty i zrozumiały sposób wszelkie zasady postępowania w programowaniu m.in prędkości i przyspieszenia.
Zrozumienie tych koncepcji jest kluczowe dla efektywnego projektowania, programowania i obsługi robotów Wittmann, co przyczynia się do postępu w wielu dziedzinach przemysłu i technologii.
… chłopaki mówią „no na 100% jest VMAX ustawiony, a się robot nie wyrabia” xd 😉
stąd ten wpis 🙂 który wyjaśnia, że nie zawsze 100% na override oznacza maksymalną prędkość robota 😉
A czy prędkość „override” można przypisać do konkretnego programu? Za każdym razem przy zmianie programu powraca mi do domyślnej wartości 30, a chciałbym aby było np. 55
Prędkością można sterować z programu robota. Natomiast w ustawieniach serwisowych ze względu na bezpieczeństwo, prędkość po każdej zmianie programowej tzn. po wgraniu programu do CPU jest redukowana domyślnie do wartości 30%